 مصدرين مصر المنصة الإخبارية الأولى الخاصة بالصادرات المصرية والتي تشمل على كافه الاخبار والتقارير العميقة عن الصادرات المصرية والأسواق العالمية.
مصدرين مصر المنصة الإخبارية الأولى الخاصة بالصادرات المصرية والتي تشمل على كافه الاخبار والتقارير العميقة عن الصادرات المصرية والأسواق العالمية.




مقالات مشابهة




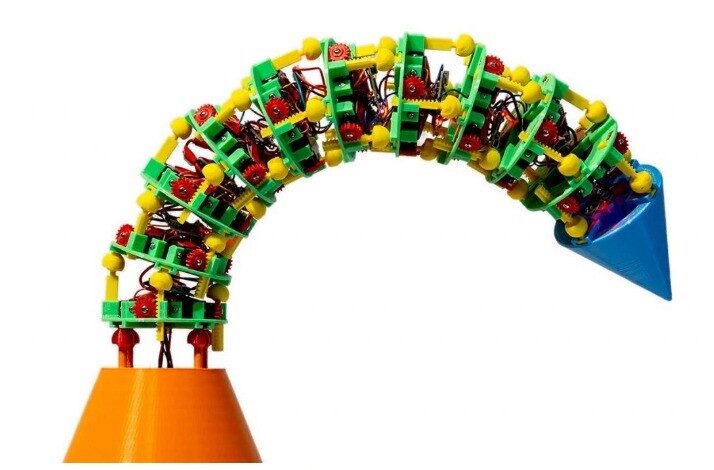
قام فريق من الباحثين من جامعة توبنغن وجامعة غراتس للتكنولوجيا بطباعة ثلاثية الأبعاد لذراع آلية قادرة على محاكاة حركات جذع الفيل. يستخدم الروبوت المطبوع بنظام FDM ، المجهز بمقبض على الطرف ، التعلم الآلي للتجول والتكيف مع المهام الجديدة ، مثل التقاط الكرات ووضعها على المنصات. تم تطويره كإثبات مفهوم منخفض التكلفة ، يمكن أن يستمر التصميم في النهاية لاستخدامه في خط الإنتاج الصناعي حيث سيكون قادرًا على أداء مجموعة متنوعة من العمليات المرنة ، مثل نقل أجزاء السيارات أو تجميع الأجهزة الإلكترونية. قال الدكتور سيباستيان أوتي ، وهو مؤلف مشارك في الدراسة ، لنيو ساينتست ، حلمنا هو أن نتمكن من القيام بذلك في إعداد التعلم المستمر حيث يبدأ الروبوت دون أي معرفة ثم يحاول الوصول إلى الأهداف ، وأثناء ذلك هل هذا يولد أمثلة التعلم الخاصة به. الصناعة 5.0: جذوع الفيل
جذوع الفيل هي واحدة من أفضل أعمال التطور. إنها أجزاء متساوية مرنة وقوية وتزود الأفيال بمستوى من البراعة لا تراها كثيرًا في مملكة الحيوانات. نتيجة لذلك ، فهي مصدر إلهام للعديد من المشاريع الإلكترونية الحديثة في الأوساط الأكاديمية ، حيث تعمل مشغلات تعمل بالهواء المضغوط غالبًا كألياف عضلية صناعية لتحقيق الانحناء والتمديد.
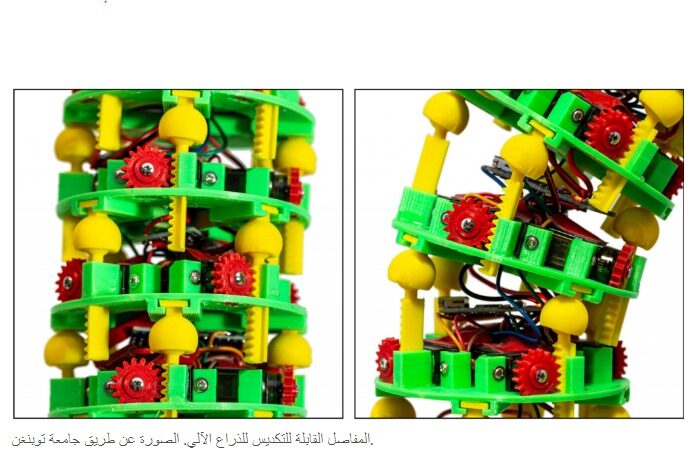
اختار أوتي وزملاؤه تصميمًا معياريًا يعتمد على مجموعة من وحدات الوصلات الموحدة والقابلة للتكديس مع ثلاث درجات من الحرية (DoF) لكل منها. يتميز التصميم الحالي بما يصل إلى عشرة من هذه الوحدات ، ولكن يمكن مضاعفة طول الروبوت باستخدام محركات أكثر قوة. يحتوي كل جزء في صندوق السيارة على العديد من المحركات التي تقود التروس التي يمكنها إمالة الوحدة حتى 40 درجة في محورين في وقت واحد. بالإضافة إلى الانحناء ، فإن الجذع الآلي قادر أيضًا على الإطالة والتقصير تمامًا مثل الشيء الحقيقي. لسوء الحظ ، فإن حساب الحركية العكسية للمشغلات الروبوتية لأداء عمليات معقدة ليس بالمهمة السهلة ، حتى مع هذا العدد الكبير من DoFs. هذا هو المكان الذي يأتي فيه الذكاء الاصطناعي.
شبكات عصبية شائكة للملاحة
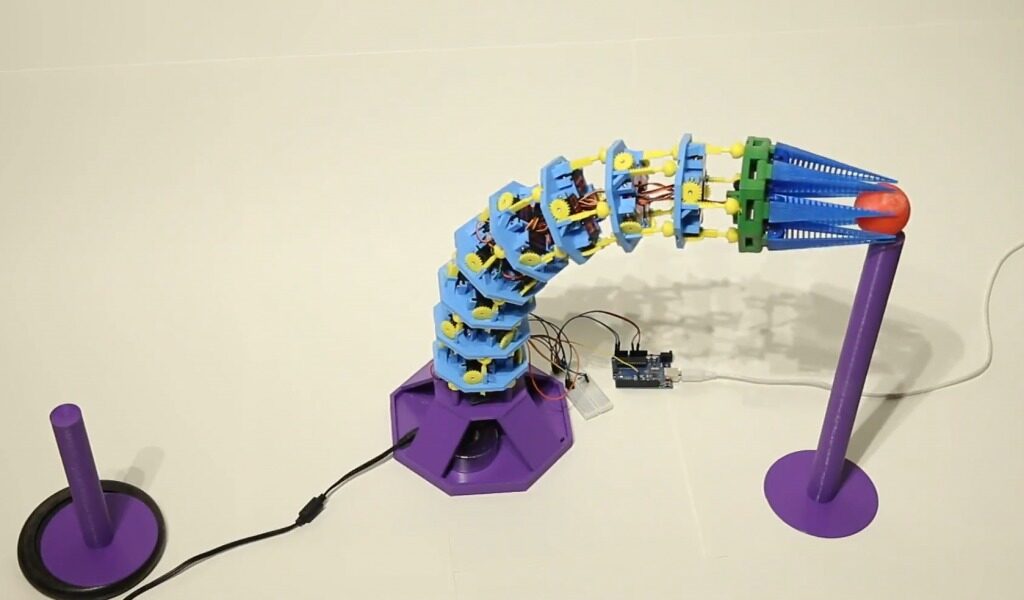
استخدم الفريق ما يسمى بالشبكة العصبية المتصاعدة (SNN) للتحكم في الروبوت ، وهو عبارة عن شبكة عصبية اصطناعية تحاكي عن كثب عمليات الدماغ الطبيعية. بالإضافة إلى دمج الحالات العصبية والمتشابكة ، تتضمن شبكات SNN أيضًا مفهوم الوقت في نماذجها. من خلال مراقبة مجموعة من حركات التدريب ، كان SNN قادرًا على تعيين حركات المحرك لأوضاع الروبوت المقابلة ، مما مكّن الفريق من فتح النماذج للتنقل الذي يحركه الهدف بدقة تقارب المليمترات. كتب الباحثون ، لم نظهر فقط أنه من الممكن إنشاء أذرع روبوتية منخفضة التكلفة تشبه الجذع باستخدام معدات الطباعة ثلاثية الأبعاد الأساسية ، ولكننا أظهرنا أيضًا كيف يمكن التحكم فيها باستخدام أحدث هياكل الشبكات العصبية المتكررة.
فيما يتعلق بالبحث المستقبلي ، أعرب الفريق عن إمكانية دمج مستشعرات المسافة القائمة على الرادار لتنفيذ وظيفة تجنب الاصطدام ، مما يتيح للجهاز العمل جنبًا إلى جنب مع البشر. يمكن أن يكون المسار الآخر هو ترجمة العمل إلى روبوت يشبه الثعبان بدلاً من ذراع ثابت ، حيث يمكن أن ينزلق لعمليات البحث والإنقاذ. يمكن العثور على مزيد من التفاصيل عن الدراسة في الورقة بعنوان التحكم في أذرع الروبوت متعددة المفاصل مع الشبكات العصبية المتصاعدة المتكررة. شارك في تأليفه مانويل تروب وروبرت ليجنشتاين وسيباستيان أوتي.
تعتبر الروبوتات منخفضة التكلفة مثالًا رئيسيًا على كيفية تطبيق الطباعة ثلاثية الأبعاد لحل المشكلات المجردة. قام فريق من الباحثين من جامعة ميجي بطوكيو مؤخرًا بتخصيص طابعة FDM ثلاثية الأبعاد لإنشاء روبوت تصنيع الكل في واحد منخفض التكلفة. Functgraph قادر على طباعة رؤوس أدوات مخصصة تلقائيًا وإرفاقها لتغيير وظائفها النشطة ، مما يتيح للمستخدمين انتزاع وتدوير وكسر الكائنات المطبوعة ثلاثية الأبعاد لتجميع الأنظمة الميكانيكية المعقدة في مهمة طباعة واحدة.
في مكان آخر ، قام العلماء في جامعة تيانجين الصينية سابقًا بطباعة ثلاثية الأبعاد لإنسان آلي قابل للتخصيص قادر على قياس ومراقبة الأنابيب في المنشآت الصناعية في الوقت الفعلي. يتميز الجهاز المكون من قطعة واحدة بسلسلة من آليات الانحناء اللينة والقابض المعياري ، مما يسمح له بتسلق البنية التحتية ذات الشكل الغريب بمرونة.
